

高速・高精度モデル GXシリーズ
高速・高精度モデル
GXシリーズ
製品概要
高速性が求められる搬送作業やねじ締め押し圧検査などの難作業に適しています。
特長
- 低振動:ジャイロプラステクノロジー搭載(注1)
- トップクラスの高剛性:ブーストモード機能搭載
- メンテナンス性:バッテリーレス
- 食品グリス仕様モデルあり
- 軽量コンパクト:GX1シリーズ本体重量8kg
(注1)GX1は非搭載です。
プロモーション動画 ![]()

-

GX1
- 最大可搬質量
- 3軸 1.5 kg
4軸 1 kg - アーム長
- 175 mm, 225 mm
-

GX4
- 最大可搬質量
- 4 kg
- アーム長
- 250 mm, 300 mm,
350 mm
-

GX8
- 最大可搬質量
- 8 kg
- アーム長
- 450 mm, 550 mm,
650 mm
-

GX10
- 最大可搬質量
- 10 kg
- アーム長
- 650 mm, 850 mm
-

GX20
- 最大可搬質量
- 20 kg
- アーム長
- 850 mm, 1000 mm
![]()
速く動いて正確に止まるエプソンの「ジャイロプラステクノロジー」
高速性を実現する「ブーストモード」
振動や整定時間を気にせず、サイクルタイムを求める案件にも簡単に対応します。
最も多く使用されているアーム長モデル(G6-551SとGX8-A552S)での標準サイクルタイム(注)の当社比較
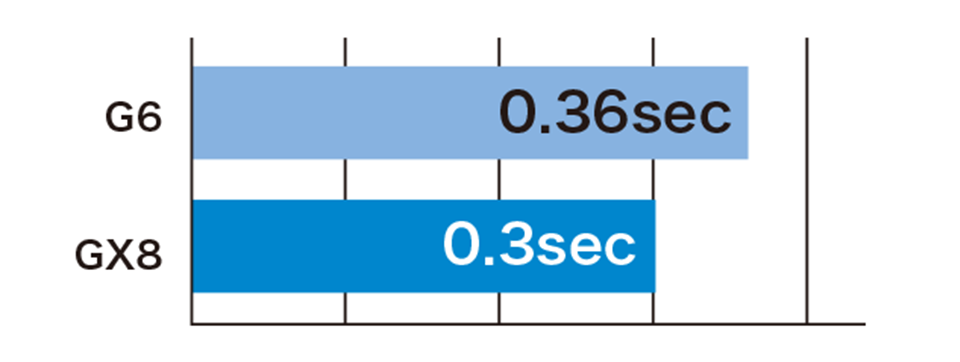
- (注)
- 粗位置決めアーチモーション(水平300 mm、垂直25 mm 往復)において、2 kg搬送時の最速となる動作ポイント・動作関連設定における動作時間です。
メンテナンス性を高める「バッテリーレス」
モーターユニットバッテリーの交換時間・費用が不要
- メンテナンス時間や装置ダウンタイム(=ランニングコスト)減
- バッテリー分の資源削減


- (注)
- コントローラー内部CPUボード用のバッテリー交換は必要。
機能安全を実現する安全機能オプションの 追加
「Safety Function License(SLS/SLP)」を購入すると、より産業用ロボットを安全に利用いただくための標準の STO/SS1 機能に加え、SLS/SLP 機能をご利用いただけます。
Safety-Limited Speed(SLS)
ロボットまたはロボットツールの速度が、あらかじめ設定した制限速度を超えていないことを監視する機能です。
万が一制限速度の超過を検知した場合、ロボットはSTO状態に移行します。
セーフティマットなどと組み合わせて、人の接近を検知するとロボットの速度を一定以下に落とすことで、安全を保つといった使い方が可能になります。
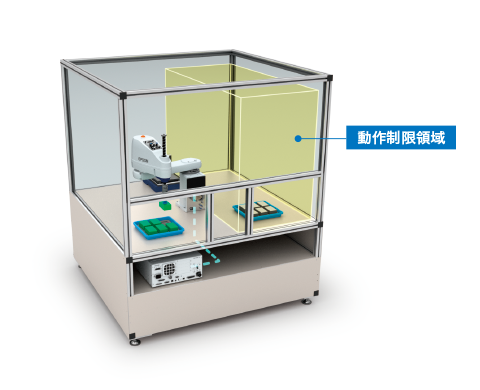
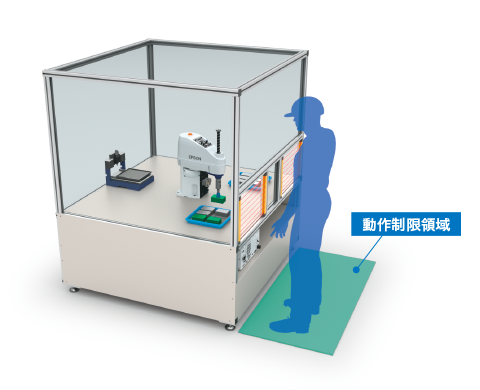
Safety-Limited Position(SLP)
ロボットまたはロボットツールの位置が、あらかじめ設定した制限領域に侵入していないことを監視する機能です。
万が一制限領域への侵入を検知した場合、ロボットはSTO状態に移行します。
ライトカーテンなどと組み合わせて、人の接近を検知すると人がいるエリアにロボットが侵入しないように制限領域を設定することで安全を保つといった使い方が可能になります。
- (注)
- 安全機能に対応したロボット本体、コントローラーと合わせてご利用いただくことが必要になります。
コントローラー対応表・オプション対応表を見る - (注)
- 本製品とともに安全柵やレーザーカーテンの設置等、リスクアセスメントに伴う安全対策についてお客様にて実施いただく必要がございます。
- (注)
- ロボットコントローラー 安全機能を使用する方は、弊社で行っている「導入トレーニング」または「メンテナンストレーニング」を必ず受講してください。
第三者機関により証明された安全性
エプソンロボットが、世界的な認証機関である、TUV SUD の第三者認証を取得しました。
ロボットが組み込まれた装置を運用するエンドユーザー様へ安全・安心を提供します。
認証対象規格
- NRTL認証(米国の労働安全衛生局が定める電気安全規格に適合していることを裏付ける認証)
- ISO102181:2011 年版
構成例
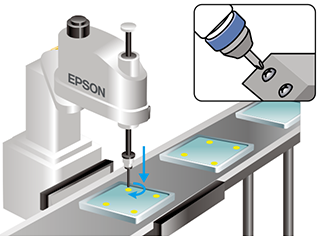
ねじ締め
| 商品名 | 備考 |
|---|---|
| スカラロボット | GX4 |
| Epson RC+ | プログラム開発ソフトウェア |
| フィールドバス | CC-Link, EtherNet/IP™ 等 |
| ティーチペンダント | TP2 |
| 力覚センサー | S2503 |
| 画像処理システム | コンパクトビジョン, 2Mカメラ, レンズ等 |
- (注)
- 自動化に必要となるエプソン製品以外については上記構成に含まれておりません。
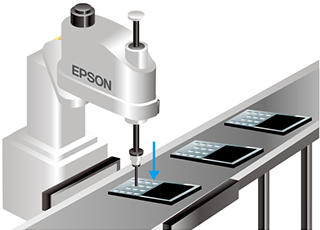
押し圧検査
| 商品名 | 備考 |
|---|---|
| スカラロボット | GX4 |
| Epson RC+ | プログラム開発ソフトウェア |
| フィールドバス | CC-Link, EtherNet/IP™ 等 |
| ティーチペンダント | TP2 |
| 力覚センサー | S2503 |
- (注)
- 自動化に必要となるエプソン製品以外については上記構成に含まれておりません。
仕様表・型名
| モデル名 | GX1-C | ||||||
|---|---|---|---|---|---|---|---|
| 型番 | 4軸仕様 | 3軸仕様 | |||||
| GX1-C171S | GX1-C171C | GX1-C221S | GX1-C221C | GX1-C171SZ | GX1-C221SZ | ||
| アーム長 | 第1+第2関節(mm) | 175 | 175 | 225 | 225 | 175 | 225 |
| 第3関節(mm) | 100(80注1) | 80 | 100(80注1) | 80 | 100 | 100 | |
| 可搬質量注2 | 定格(kg) | 0.5 | |||||
| 最大(kg) | 1 | 1.5 | |||||
| 繰り返し精度 | 第1+第2関節(mm) | +/−0.005 | +/−0.008 | +/−0.005 | +/−0.008 | ||
| 第3関節(mm) | +/−0.01 | ||||||
| 第4関節(deg) | +/−0.01 | - | - | ||||
| サイクルタイム注3 | (sec) | 0.292 | 0.288 | 0.292 | 0.288 | ||
| 最大速度 | 第1+第2関節(mm/s) | 2630 | 3000 | 2630 | 3000 | ||
| 第3関節(mm/s) | 1200 | ||||||
| 第4関節(deg/s) | 3000 | - | - | ||||
| 第4関節許容慣性モーメント注4 | 定格(kg·m2) | 0.0003 | - | - | |||
| 最大(kg·m2) | 0.004 | - | - | ||||
| 第3関節押込み力 | (N) | 50 | |||||
| 環境仕様 | 標準 | クリーンルーム注5&ESD注6 | 標準 | クリーンルーム注5&ESD注6 | 標準 | ||
| 設置方法 | 架台取付 | ||||||
| 本体質量(ケーブル質量含まず) | (kg)以下 | 8 | |||||
| ユーザーインターフェース | D-Sub 15pin×1, D-Sub 9pin×1 Current capacity 1A(Rated) | ||||||
| ユーザー配管 | ø4 mmエアチューブ×1, ø6 mmエアチューブ×2: 耐圧:0.59 Mpa [6 kgf/cm2 : 86 psi] | ||||||
| 適合コントローラー | RC800-A | ||||||
| 電源電圧 | (V) | AC200-240単相 | |||||
| 電源容量 | (kVA) | 0.5注7 | |||||
| パワー&シグナルケーブル長 | (m) | 3 / 5 / 10 / 15 / 20 | |||||
| 安全規格 | CE, KCs, NRTL | ||||||
- 注1
- じゃばらオプション仕様時
- 注2
- 負荷質量は、最大可搬質量を超えて使用しないでください。
- 注3
- 粗位置決めモーション(水平100mm, 垂直25mm 往復)において、0.5kg 搬送時にて最速となる動作ポイントでの動作時間です。
- 注4
- 負荷、エンドエフェクタ―の状況に応じて、Inertia命令によるパラメータ設定を行ってください(パラメーター算出方法は取扱説明書を参照ください)
- 注5
- クリーン度: ISO14644-1 クラス3(Fed-std209D クリーンクラス1 相当)
- 注6
- ESD仕様とは、主要な樹脂系部品に導電性材料を使用、またはメッキ処理を施す等の帯電防止対応した仕様です。マニピュレーター先端部(ツール取付部)については、弊社基準の測定動作直後においても±5V以下であることを確認しています。
- 注7
- 動作環境、動作プログラムにより異なります。





関連情報
お問い合わせ
購入・導入前のご相談、お見積をご希望のお客様は、
下記お問い合わせフォームよりお気軽にご相談ください。
サービス・サポート内容については下記ページをご参照ください。
商標について
(注) 本媒体上の他者商標の帰属先は、 商標について をご確認ください。